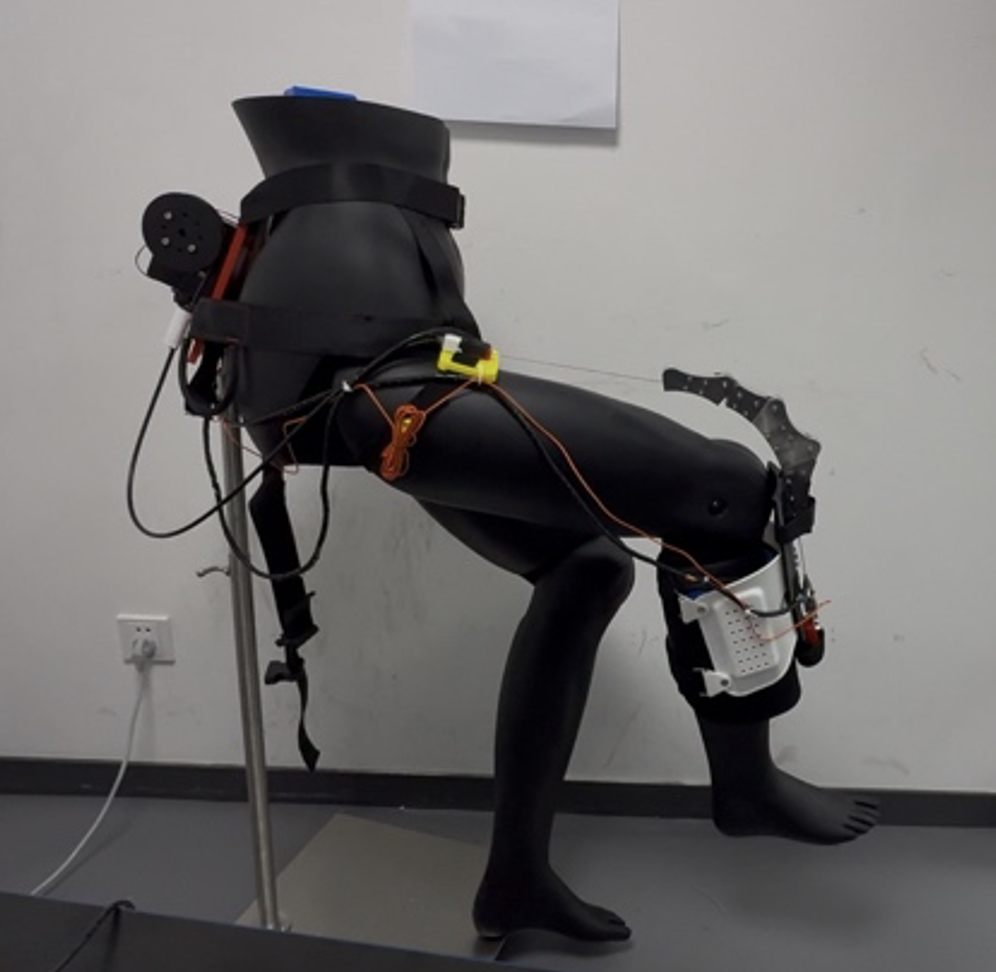
The user puts on the device and powers it on — the twelve-link semi-rigid chain passively conforms to their individual knee geometry. From there, they activate one of three rehabilitation modes using the on-board voice control: "Hey Regenix, start Assistive training."
Regenix mirrors the three stages of rehabilitation. Each mode trades the device's authority for the patient's own, in proportion to how much strength they have recovered.
Stage 01
Assistive
Motor leads.
The motor helps the patient complete movements when strength is still limited — full-arc flexion and extension on cue.
Stage 02
Protective
Motor follows.
Assistance only activates after the user generates some force themselves — encouraging early muscle engagement without overload.
Stage 03
Resistive
Motor opposes.
The device adds controlled resistance to rebuild strength as recovery progresses — closed-loop torque against the patient's own effort.
After each session, the training data feeds into an on-device AI pipeline that analyzes it and generates a full rehabilitation report — flagging the user's current training stage, projected recovery timeline, and quantitative metrics that doctors can act on.
01
Voice command
"Hey Regenix, start Assistive."
→
02
Guided session
Mode-specific torque profile, 8–15 min.
→
03
On-device analysis
Range, torque, symmetry, adherence.
→
04
Clinician report
Stage, timeline, recommended next session.
Fig. 3.1
Closed-loop session pipeline. The device runs the same four steps every session — the report from step 4 informs the mode for step 1 of the next.